Implementation of A Star Search Algorithm in python – Artificial Intelligence
In this tutorial, we will understand the A Star Search Algorithm with a solved numerical example and implementation in python.
A Star Solved Numerical Examples
A Star Search Algorithm with a solved numerical example

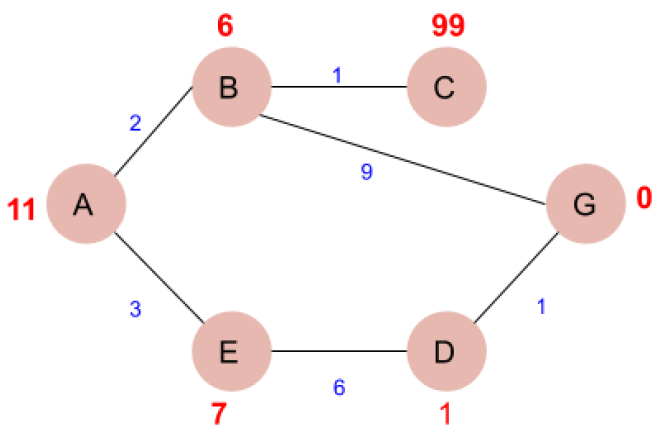
Numbers written on edges represent the distance between nodes. Numbers written on nodes represent the heuristic value.
Given the graph, find the cost-effective path from A to G. That is A is the source node and G is the goal node.
Now from A, we can go to point B or E, so we compute f(x) for each of them,
A → B = g(B) + h(B) = 2 + 6 = 8
A → E = g(E) + h(E) = 3 + 7 = 10
Since the cost for A → B is less, we move forward with this path and compute the f(x) for the children nodes of B.
Now from B, we can go to point C or G, so we compute f(x) for each of them,
A → B → C = (2 + 1) + 99= 102
A → B → G = (2 + 9 ) + 0 = 11
Here the path A → B → G has the least cost but it is still more than the cost of A → E, thus we explore this path further.
Now from E, we can go to point D, so we compute f(x),
A → E → D = (3 + 6) + 1 = 10
Comparing the cost of A → E → D with all the paths we got so far and as this cost is least of all we move forward with this path.
Now compute the f(x) for the children of D
A → E → D → G = (3 + 6 + 1) +0 = 10
Now comparing all the paths that lead us to the goal, we conclude that A → E → D → G is the most cost-effective path to get from A to G.
Implementation of A Star Search Algorithm in python
def aStarAlgo(start_node, stop_node):
open_set = set(start_node)
closed_set = set()
g = {} #store distance from starting node
parents = {} # parents contains an adjacency map of all nodes
#distance of starting node from itself is zero
g[start_node] = 0
#start_node is root node i.e it has no parent nodes
#so start_node is set to its own parent node
parents[start_node] = start_node
while len(open_set) > 0:
n = None
#node with lowest f() is found
for v in open_set:
if n == None or g[v] + heuristic(v) < g[n] + heuristic(n):
n = v
if n == stop_node or Graph_nodes[n] == None:
pass
else:
for (m, weight) in get_neighbors(n):
#nodes 'm' not in first and last set are added to first
#n is set its parent
if m not in open_set and m not in closed_set:
open_set.add(m)
parents[m] = n
g[m] = g[n] + weight
#for each node m,compare its distance from start i.e g(m) to the
#from start through n node
else:
if g[m] > g[n] + weight:
#update g(m)
g[m] = g[n] + weight
#change parent of m to n
parents[m] = n
#if m in closed set,remove and add to open
if m in closed_set:
closed_set.remove(m)
open_set.add(m)
if n == None:
print('Path does not exist!')
return None
# if the current node is the stop_node
# then we begin reconstructin the path from it to the start_node
if n == stop_node:
path = []
while parents[n] != n:
path.append(n)
n = parents[n]
path.append(start_node)
path.reverse()
print('Path found: {}'.format(path))
return path
# remove n from the open_list, and add it to closed_list
# because all of his neighbors were inspected
open_set.remove(n)
closed_set.add(n)
print('Path does not exist!')
return None
#define fuction to return neighbor and its distance
#from the passed node
def get_neighbors(v):
if v in Graph_nodes:
return Graph_nodes[v]
else:
return None
#for simplicity we ll consider heuristic distances given
#and this function returns heuristic distance for all nodes
def heuristic(n):
H_dist = {
'A': 11,
'B': 6,
'C': 5,
'D': 7,
'E': 3,
'F': 6,
'G': 5,
'H': 3,
'I': 1,
'J': 0
}
return H_dist[n]
#Describe your graph here
Graph_nodes = {
'A': [('B', 6), ('F', 3)],
'B': [('A', 6), ('C', 3), ('D', 2)],
'C': [('B', 3), ('D', 1), ('E', 5)],
'D': [('B', 2), ('C', 1), ('E', 8)],
'E': [('C', 5), ('D', 8), ('I', 5), ('J', 5)],
'F': [('A', 3), ('G', 1), ('H', 7)],
'G': [('F', 1), ('I', 3)],
'H': [('F', 7), ('I', 2)],
'I': [('E', 5), ('G', 3), ('H', 2), ('J', 3)],
}
aStarAlgo('A', 'J')Output:
Path found: ['A', 'F', 'G', 'I', 'J']
#for simplicity we ll consider heuristic distances given
#and this function returns heuristic distance for all nodes
def heuristic(n):
H_dist = {
'A': 11,
'B': 6,
'C': 99,
'D': 1,
'E': 7,
'G': 0,
}
return H_dist[n]
#Describe your graph here
Graph_nodes = {
'A': [('B', 2), ('E', 3)],
'B': [('A', 2), ('C', 1), ('G', 9)],
'C': [('B', 1)],
'D': [('E', 6), ('G', 1)],
'E': [('A', 3), ('D', 6)],
'G': [('B', 9), ('D', 1)]
}
aStarAlgo('A', 'G')Output:
Path found: ['A', 'E', 'D', 'G']
Summary:
In this tutorial, we understood the A Star Search Algorithm with a solved numerical example and implementation in python. If you like the tutorial share it with your friends. Like the Facebook page for regular updates and YouTube channel for video tutorials.